BluetoothやらWifiやらどこまでいじったのか判らなくなってきたので、再度ラズパイをセットアップし直すコトとしました。
概ね方向性が見えてきたので、自動運転に必要な必要最低限のセットアップをすると共に、今後ラズパイを増やした時の指針としようというワケです。
備忘録としてそのうち個別ページにでもまとめておくつもりですが、microSDカードに必要ファイルをコピーしてラズパイにセットし、インストール後立ち上がるraspi-config画面でキーボードとsshを使えるようにしたらあとはWindowsマシンからsshにてセットアップします。
セットアップと言っても
・IPアドレスの変更
・ホスト名でアクセスできるようAvahiのインストール
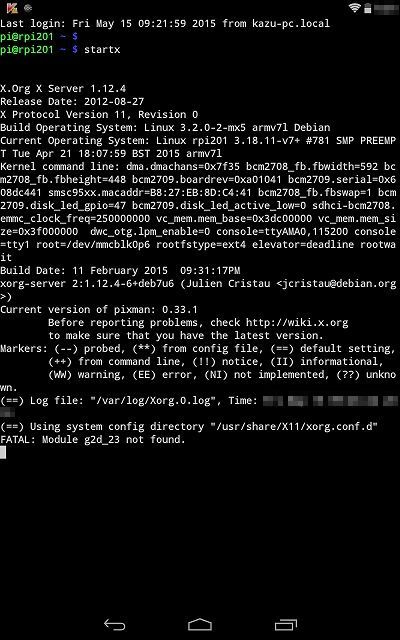
・リモートでXにアクセスできるようVNCサーバーのインストール
位のものです。
1時間程度で総て完了し、WindowsマシンからラズパイのX画面も操作できるようになりました。
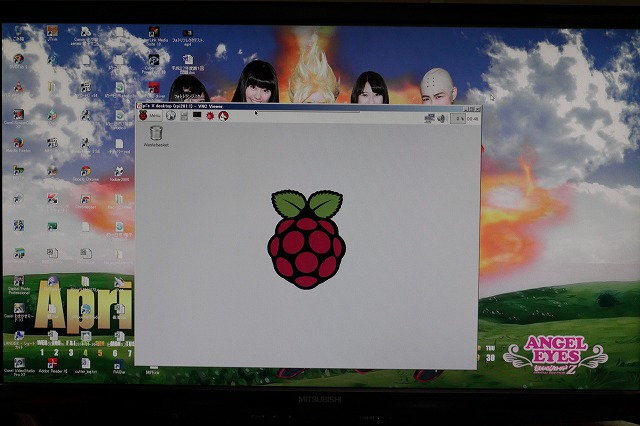
何故かVNCクライアントが画面キャプチャ出来ないので写真撮ってますがね。
とはいえ、ワタシの使い方ではXを使う機会がどれだけあるかはビミョーです。自動運転では基本的にラズパイの画面は不要になるように作るつもりで、その場合は電源とネットワークケーブルさえ繋がっていれば使える状態になります。Wifiとすればネットワークケーブルさえ要らなくなるのですが、比較的電気を食うWifiドングルによる放熱トラブルも心配されるコトから、当面有線LANで使うつもりです。kodiで使う場合でもWifiだと遅い気がするしな。
ついでにAndroidからもssh接続できるようにしてみました。
結局Wifi環境が必要となりますが、それでも出先で手軽にラズパイを遠隔操作できるようになるはず。
興味本位でXにも接続できるようにしておきます。
Xは余分ですが、コレでインフラ整備はひと段落でしょうか。あとはPICとの通信に使うソフト類の製作が進めばカタチになるはず、ラズパイいじりはココでひと区切りとします。
ってか、先が長いな。

コメントする
※ コメントは認証されるまで公開されません。ご了承くださいませ。